
If you have not already taken a look, let me suggest that you check out my first post CREATIVITY IN THE MILLENNIAL KINGDOM PART 1 posted yesterday on the 23rd of November, where I reported on ENERGY and TRANSPORT
We are made in God’s image by the creator of this Cosmos and were given dominion by Him over Earth. We lost that dominion at The Fall when Adam and Eve disobeyed God. Satan, a spiritual demonic being, is now the Prince of this World. Regardless, we still have the God-given ability to create using the abundant materials He created, within the boundaries of the complex physical laws God has established to control His universe.
Based on Biblical prophecy we are fast approaching the time of Jesus’ return to this earth to rescue the Saints and to pour out His wrath on an unrepentant world. The world has turned its back on God and His values and His commandments. One of the most significant Biblical end-times prophecies tells us that prior to Jesus’ return God’s nation, Israel would be re-established. Against all odds, the Jews are back in their land with the Hebrew language reborn. This occurred back in 1948. We are now starting to see many of the other prophesied end times signs, wars, and rumours of wars, apostasy in the church as it compromises with the world and its distorted values, gay marriage, homosexual and transgender priests, pestilences, famines, lawlessness and more. What this site is about, is preparing people for Jesus’ Millennial reign on this earth when Jesus and the resurrected Saints will be ruling the nations with a “rod of iron”. There is no doubt in my mind that new technologies will be developed in the Millennium that enhance living standards. Technologies such as Robotics and the use of Computers and AI.
INDUSTRY – Robotics
The race this year between artificial intelligence (AI) giants like DeepMind, Nvidia, Tesla, Google AI, Meta, and OpenAI has been something to watch. Every few weeks has brought a major breakthrough with applications in this incredible technology. This time, it’s a breakthrough in something called imitation learning from OpenAI. Imitation learning is exactly what it sounds like: an AI that learns by imitating. The implications of this kind of imitation learning are incredible and will become very relevant next year.
When I think of a wide range of general tasks where a robotic arm or dexterous humanoid robot could be useful, imitation learning makes perfect sense. Whether at home or the workplace, imagine being able to show an AI-powered robot what task(s) need to be performed. An AI could learn by watching. Then it could supplement that learning by going to the internet and finding more learning material, and soon master any given task(s).
That’s what makes OpenAI’s announcement so incredible. It’s the beginning of robots being able to learn by watching, rather than through weeks of programming and testing.
Flocks of assembler robots show potential for making larger structures. This report comes from the Massachusetts Institute of Technology (MIT). Researchers from MIT’s Center for Bits and Atoms (CBA) make progress toward groups of robots that could build almost anything, including buildings, vehicles, and even bigger robots.

The new work builds on years of research, including recent studies demonstrating that objects such as a deformable airplane wing and a functional racing car could be assembled from tiny identical lightweight pieces — and that robotic devices could be built to carry out some of this assembly work. Now, the team has shown that both the assembler bots and the components of the structure being built can all be made of the same subunits, and the robots can move independently in large numbers to accomplish large-scale assemblies quickly.
As in previous experiments, the new system involves large, usable structures built from an array of tiny identical subunits called voxels (the volumetric equivalent of a 2-D pixel). But while earlier voxels were purely mechanical structural pieces, the team has now developed complex voxels that each can carry both power and data from one unit to the next. This could enable the building of structures that can not only bear loads but also carry out work, such as lifting, moving and manipulating materials — including the voxels themselves.
“When we’re building these structures, you have to build in intelligence,” Gershenfeld says. While earlier versions of assembler bots were connected by bundles of wires to their power source and control systems, “what emerged was the idea of structural electronics — of making voxels that transmit power and data as well as force.” Looking at the new system in operation, he points out, “There’s no wires. There’s just the structure.”
The robots themselves consist of a string of several voxels joined end-to-end. These can grab another voxel using attachment points on one end, then move inchworm-like to the desired position, where the voxel can be attached to the growing structure and released there.
Gershenfeld explains that while the earlier system demonstrated by members of his group could in principle build arbitrarily large structures, as the size of those structures reached a certain point in relation to the size of the assembler robot, the process would become increasingly inefficient because of the ever-longer paths each bot would have to travel to bring each piece to its destination. At that point, with the new system, the bots could decide it was time to build a larger version of themselves that could reach longer distances and reduce the travel time. An even bigger structure might require yet another such step, with the new larger robots creating yet larger ones, while parts of a structure that include lots of fine detail may require more of the smallest robots.
Aaron Becker, an associate professor of electrical and computer engineering at the University of Houston, who was not associated with this research, calls this paper “a home run — [offering] an innovative hardware system, a new way to think about scaling a swarm, and rigorous algorithms.”
Becker adds: “This paper examines a critical area of reconfigurable systems: how to quickly scale up a robotic workforce and use it to efficiently assemble materials into the desired structure. … This is the first work I’ve seen that attacks the problem from a radically new perspective — using a raw set of robot parts to build a suite of robots whose sizes are optimized to build the desired structure (and other robots) as fast as possible.”
INFORMATION – Computing power
This year was a banner year in the world of supercomputing. The first major breakthrough was the commissioning of Frontier – the world’s first exaflop supercomputer. It’s capable of doing over a quintillion (1,000,000,000,000,000,000) operations per second.
Then this fall, Tesla announced its artificial intelligence (AI) supercomputer, Dojo, which also performs at more than an exaflop.
And just days ago, AI-centric semiconductor company Cerebras announced that it had commissioned its own AI exaflop supercomputer for just $30 million.
Performance of the World’s Top Supercomputers
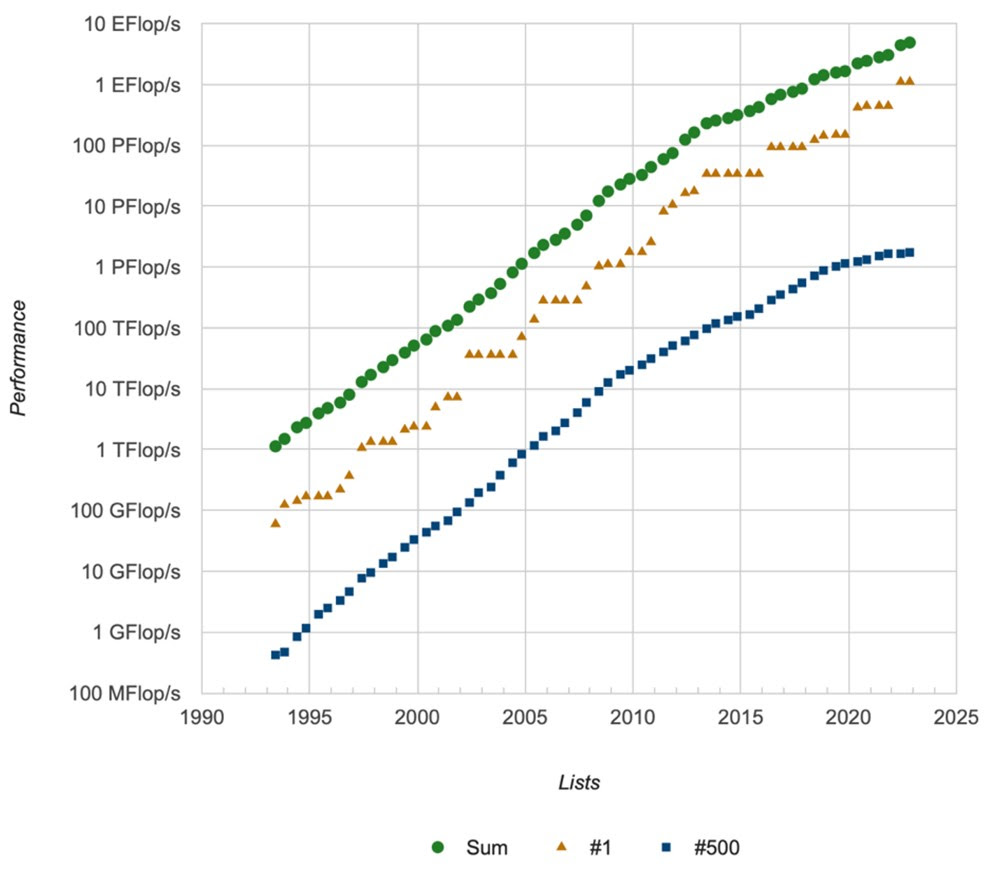
Source: top500.org
The chart above is extraordinary. It’s in log scale, with each vertical tick representing a 10-fold increase in computing power.
The next major performance level will come out next year at the Los Alamos National Laboratory, when Nvidia launches its 10 exaflop supercomputer Venado.
The exponential growth of computing power has resulted in an abundance of both computer processing and data. But the rapid growth created a problem. The International Systems of Units (SI) started running out of SI prefixes like “exa” (1018) to denote the ever-increasing magnitude of the numbers.
After “exa,” there was only “zetta” (1021) and “yotta” (1024). At the current pace, it won’t be long before we blow past those prefixes too.
That’s why, at the 27th meeting of the General Conference on Weights and Measures, Resolution 3 extended the range of SI prefixes to account for even greater numbers in the future:
- ronna (1027).
- quetta (1030).
Technology is moving so fast right now, it won’t be long before we’re hearing words like “ronnabytes,” or “quettaflop supercomputers.”
